Research question
How does time affect the position of the buggy?
Variables
Independent: time (sec)
Dependent: position of the buggy (cm)
Control: the same buggy, the same slope and material of the travelling surface, the same origin, the same speed
Dependent: position of the buggy (cm)
Control: the same buggy, the same slope and material of the travelling surface, the same origin, the same speed
Method for effective control of variables
- By using the same buggy, the speed of the tested buggy and other possible variations due to the tested subject can be avoided
- Setting a tag on the origin will keep the starting position constant
- Moving along the same track/ floor in the room will keep the slope and surface material constant
Method for the collection of data
- A timer will collect a precise time spent travelling a certain distance
- A meter stick (or many of them) will be lined up from the initial position to the terminal position to get the distance travelled
Procedure
- Reseat timer and place the buggy at the origin
- Timing person starts timer and calls for 'release', buggy stopper releases buggy
- Stop the timer at a designated time according to the table and stop the buggy
- Data recorder measures the distance from the initial position to the terminal position using a meter stick
- Record distance and repeat experiment with each time slot (1 trial/time slot)
- When all times are tested, move the buggy's initial position from the origin to -91cm and repeat #1~5
Experiment
testing surface: classroom floor
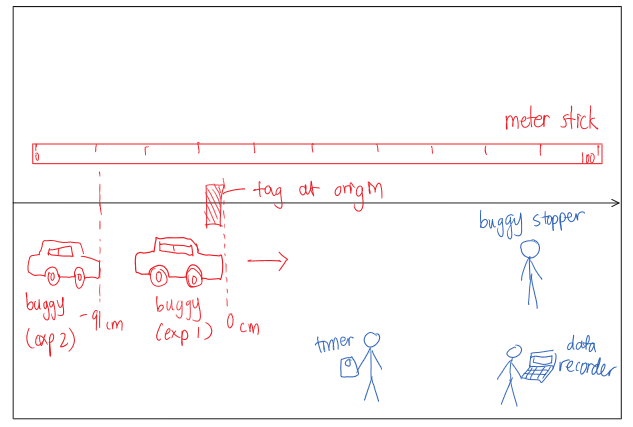
Diagram of lab setup
Diagram of lab setup
Recorded and processed raw data
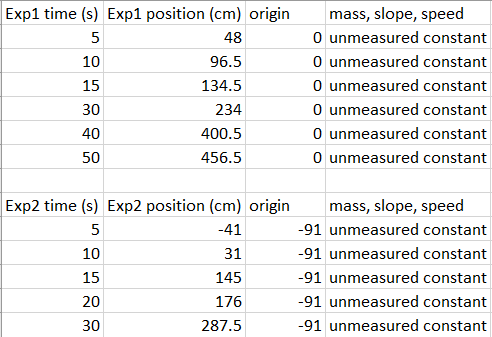
Experiment 1 initial position: 0cm
Experiment 2 initial position: -91cm
There may be measurement errors due to hand-eye coordination and reaction time to press down the timer at the exact moment, but points recorded fall within acceptable range.
Experiment 2 initial position: -91cm
There may be measurement errors due to hand-eye coordination and reaction time to press down the timer at the exact moment, but points recorded fall within acceptable range.
- Type in data to Logger Pro 3.15
- Choose linear fit to find model that speaks of the time/position relatinonship- calculations will be done by the computer
Graph
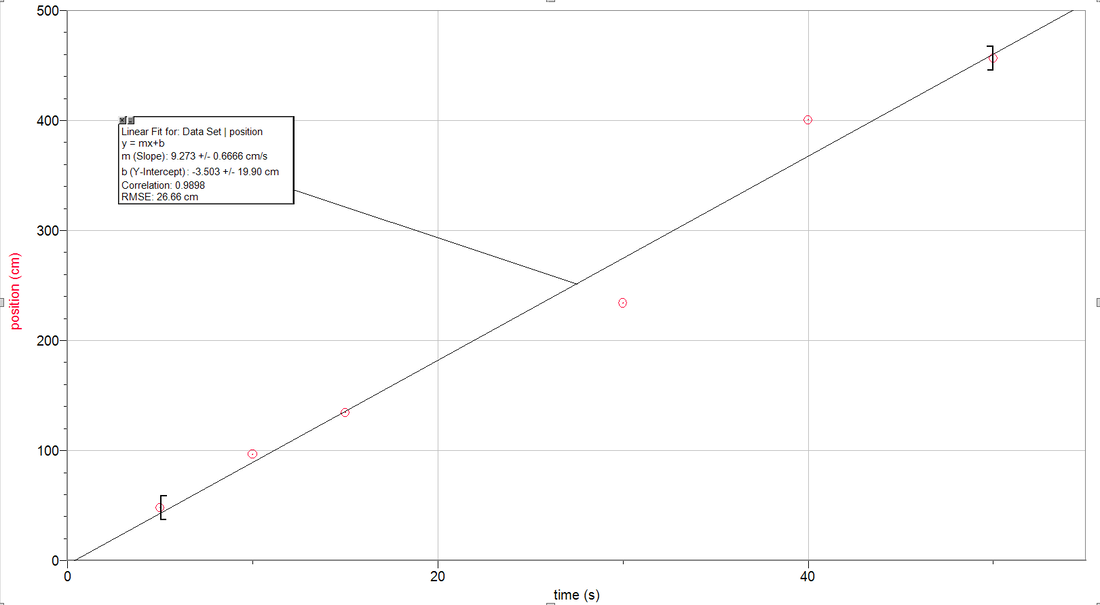
(Above) Experiment 1 linear model
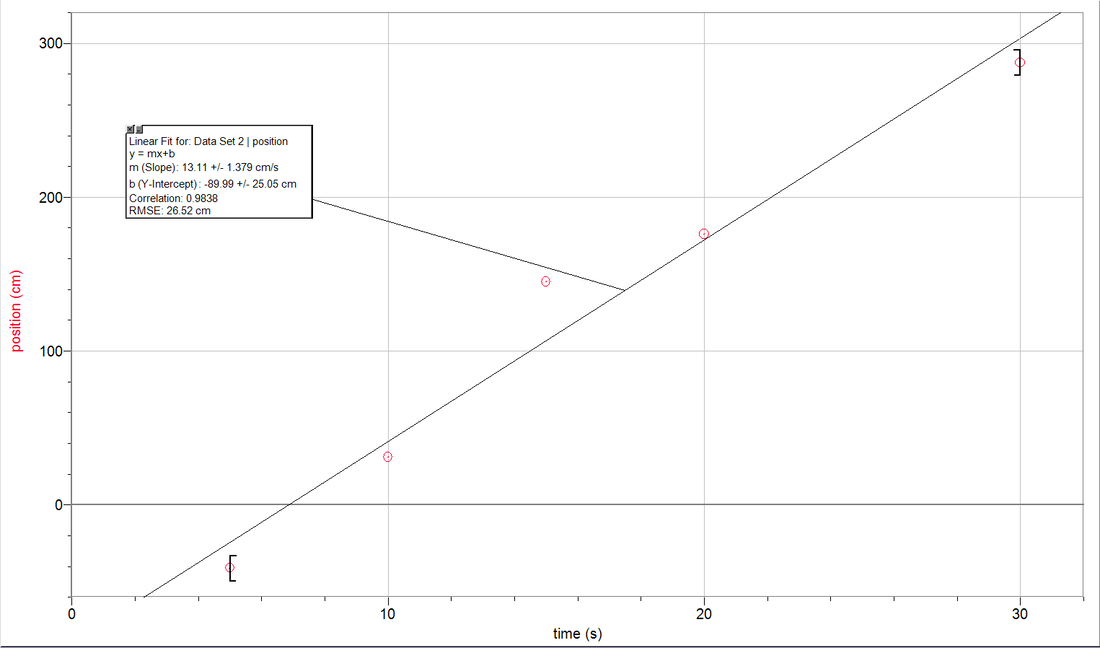
(Above) Experiment 2 linear model
Interpretation and Analysis
Experiment 1:
Conclusion:
- x=9.273t-3.503
- slope= 9.273
- y intercept (initial position) = -3.503cm
- slope= for every 1 second increase, the buggy travels 9.273cm
- x=13.11t-89.99
- slope= 13.11
- y intercept = -89.99cm
- slope= for every 1 second increase, the buggy travels 13.11cm
Conclusion:
- From evidence, the more seconds passed, the further the buggy goes
- Generalization to other situations: a positive linear model means a bigger x variable = a bigger y variable. A negative linear model means a bigger x variable = a smaller y variable.
Lab Conclusion |
Based on a reasonable interpretation of the data, we can conclude that the points of both experiments fit well with a linear model, therefore the buggy is moving at a constant speed without changing directions during the experiment. The positive slope and constant steepness of it means that the buggy has a positive velocity, indicating that it is moving forward (in relation to the origin) with unchanging speed. To address the research question: the longer the buggy goes, the further it goes from the initial position in constant speed. The group has medium confidence in our results as we do not have a large range and quantity of data, and there are possible errors made due to reaction time.
Evaluating procedures
Weaknesses, limitations, and uncertainties:
- Hand recording time is a significant source of uncertainty in the lab as reaction time may cause a delayed or early 'stop' of the timer, making measurements less accurate
- Cooperation effectiveness is another source of uncertainty- the buggy initiator may hear the call for 'release buggy' later than the time where the recorder pressed down the timer, making measurements less accurate
Improving the investigation
Improvement and alternative methods:
- Using a wider range of data points and a lot more data points will get a more accurate linear model to the data set
- If hand recorded, doing multiple trials for each time slot and taking the average will make timing closer to the actual set time
- Using a fully automatic timing system will make results much more accurate as it eliminates reaction time errors
- A buggy releasing tool connected to the timing system would eliminate cooperation problems
